lstm学习笔记
文章目录
从 RNN到LSTM,重点介绍LSTM 的网络结构和LSTM是如何缓解RNN 中出现的梯度消失。
循环神经网络(RNN)
一个RNN可以看作是同一个网络的多份副本,每一份都将信息传递到下一个副本。如果我们将环展开的话:

这种链式结构展示了RNN与序列和列表的密切关系。RNN的这种结构能够非常自然地使用这类数据。
RNN 的主要应用如下:
- 文本相关。主要应用在自然语言处理方面(NLP)、对话系统、情感分析、机器翻译
- 时序相关。就是在做时序预测问题,比如预测天气、温度,包括有很多人使用其在做预测股票价格的问题
长期依赖(Long Term Dependencies)的问题
对于RNN 来说,可以处理非常短的文本序列(比如下文第一种情况)但是不可以处理比较长的序列(比如下文第二种情况)
有时候,我们只需要看最近的信息,就可以完成当前的任务。比如,考虑一个语言模型,通过前面的单词来预测接下来的单词。如果我们想预测句子“the clouds are in the sky”中的最后一个单词,我们不需要更多的上下文信息——很明显下一个单词应该是sky。 RNN 是可以被用来进行这样问题的训练学习。
然而,有时候我们需要更多的上下文信息。比如,我们想预测句子“I grew up in France… I speak fluent French”中的最后一个单词。不幸的是,随着距离的增大,RNN对于如何将这样的信息连接起来无能为力。
LSTM缓解梯度消失
(1) RNN 中为什么会出现梯度消失
RNN 中的传播公式
$$
\begin{equation}
\begin{array}{l}{s_{t}=\phi\left(U x_{t}+W s_{t-1}\right) } \\
{o_{t}=f\left(V s_{t}\right) }
\end{array}
\end{equation}
$$
其中 $s_t$表示隐藏层的状态值,$W$ 表示$s$的权重矩阵, $U$ 表示 $x$的权重矩阵。 第一个公式是隐藏层的计算公式,第二层是输出层的计算。
假设时间序列 $t =3$,那么可得到:
$t=1$的时候的状态和输出,
$$
\begin{equation}
\begin{array}{l}{s_{1}=\phi\left(U x_{1}+W s_{0}\right) } \\
o_{1}=f\left(V \phi\left(V x_{1}+W s_{0}\right)\right.
\end{array}
\end{equation}
$$
当 $t =2$ 的状态和输出:
$$
\begin{equation}
\begin{array}{l}{s_{2}=\phi\left(U x_{2}+W s_{1}\right)} \\
{o_{2}=f\left(V \phi\left(V x_{2}+W s_{1}\right)\right)=f\left(V \phi\left(V x_{2}+W \phi\left(U x_{1}+W s_{0}\right)\right)\right)}\end{array}
\end{equation}
$$
当 $t =3$的状态和输出:
$$
\begin{equation}
\begin{array}
{l}{s_{3}=\phi\left(U x_{3}+W s_{2}\right)} \\
o_{3}=f\left(V \phi\left(U x_{3}+W s_{2}\right)\right)=\ldots=f\left(V \phi\left(U x_{3}+W \phi\left(U x_{2}+W \phi\left(U x_{1}+W s_{0}\right)\right)\right)\right)
\end{array}
\end{equation}
$$
所以对于RNN 而言,所谓的无法解决长依赖是因为 $s_0$, $x_1$经过了太多的激活层和权重相乘。而常见的激活函数sigmoid 或者tanh其最大值是1,不可能是一直是1,那么很容易等于0。如 $0.8^{50}=0.00001427247$。 这就是RNN 中出现梯度消失的原因。
使用Relu 是可以解决梯度消失,因为 $x>0$ 情况下梯度恒为0。但是容易发生梯度爆炸(虽然可以通过设置适当的阈值)。
如果说通过修改网络结构来解决梯度消失或者梯度爆炸,那么就是LSTM 了。
(2)LSTM 是如何缓解梯度消失的?
$$ \begin{equation} h_{t}=o_{t} \odot \phi \left(f_{t} \odot c_{t-1}+i_{t} \odot \phi \left(W_{x c} x_{t}+W_{h c} h_{t-1}+b_{c}\right)\right) \end{equation} $$
在隐藏层中 LSTM 相对于普通的RNN 有了很多加和,从而保证了在$c$(context) 这个路径上是有梯度的。但是其他路径上梯度流与普通 RNN 类似,照样会发生相同的权重矩阵反复连乘。梯度爆炸相对于梯度消失是更容易解决的。
参考文献 Understanding LSTM Networks
LSTM
LSTM 是用来解决RNN 中的梯度消失/ 梯度爆炸问题的,可以处理 long-term sequence了。
门(gate )定义: gate 实际上就是一层全连接层,输入是一个向量,输出是一个 0到1 之间的实数向量。公式如下: $$ g ( \mathbf { x } ) = \sigma ( W \mathbf { x } + \mathbf { b } ) $$
遗忘门(forget gate) 它决定了上一时刻的单元状态 $c_{t-1} $有多少保留到当前时刻$ c_t$ 输入门(input gate) 它决定了当前时刻网络的输入 $x_t$ 有多少保存到单元状态 $c_t$ 输出门(output gate) 控制单元状态$ c_t $有多少输出到 LSTM 的当前输出值 $h_t$
(1)LSTM网络
在普通的RNN中,重复模块结构非常简单,例如只有一个tanh层。

LSTM也有这种链状结构,不过其重复模块的结构不同。LSTM的重复模块中有4个神经网络层,并且他们之间的交互非常特别。

(2)LSTM分步详解
LSTM的第一步是决定我们将要从元胞状态中扔掉哪些信息。遗忘门观察$h_{t−1}$和 $x_t$,对于元胞状态 $C_{t−1} $中的每一个元素,输出一个0-1之间的数。1表示“完全保留该信息”,0表示“完全丢弃该信息”。

下一步是决定我们将会把哪些新信息存储到元胞状态中。这步分为两部分。首先,有一个叫做“输入门(Input Gate)”的Sigmoid层决定我们要更新哪些信息。接下来,一个tanh层创造了一个新的候选值,$\tilde { C } _ { t }$,该值可能被加入到元胞状态中。在下一步中,我们将会把这两个值组合起来用于更新元胞状态。

现在我们该更新旧元胞状态 $C_{t−1} $到新状态 $C_t$了。上面的步骤中已经决定了该怎么做,这一步我们只需要实际执行即可。
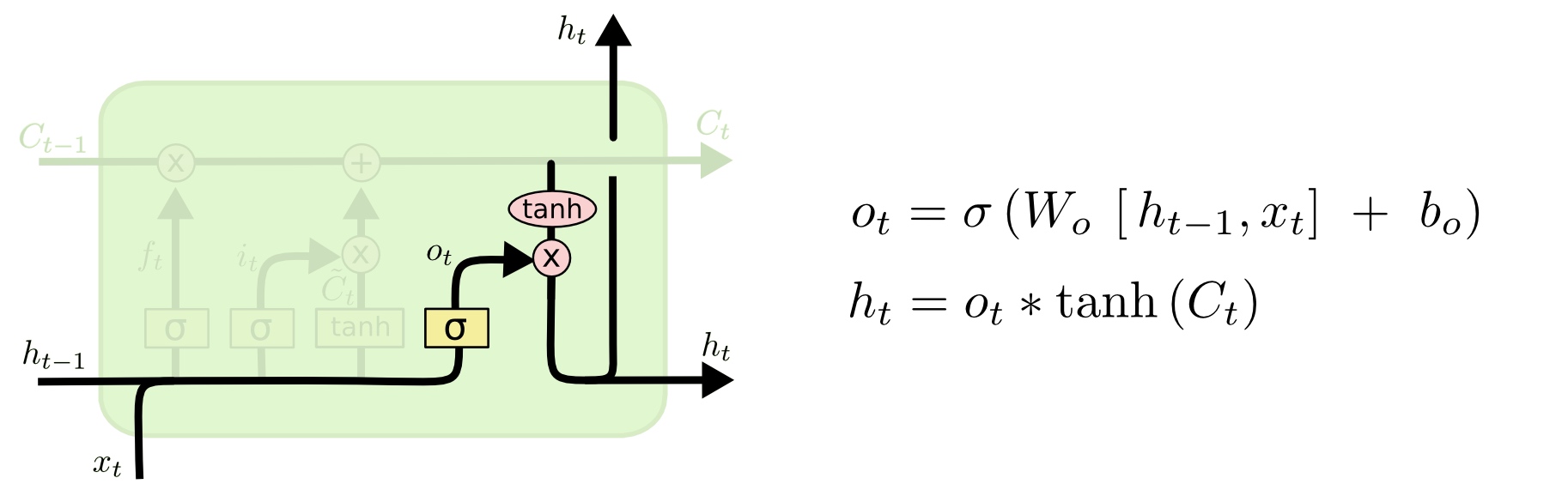
 最后,我们需要决定最终的输出。输出将会基于目前的元胞状态,并且会加入一些过滤。首先我们建立一个Sigmoid层的输出门(Output Gate),来决定我们将输出元胞的哪些部分。然后我们将元胞状态通过tanh之后(使得输出值在-1到1之间),与输出门相乘,这样我们只会输出我们想输出的部分。
最后,我们需要决定最终的输出。输出将会基于目前的元胞状态,并且会加入一些过滤。首先我们建立一个Sigmoid层的输出门(Output Gate),来决定我们将输出元胞的哪些部分。然后我们将元胞状态通过tanh之后(使得输出值在-1到1之间),与输出门相乘,这样我们只会输出我们想输出的部分。
优点:解决了RNN 中的梯度消失的问题,可以处理 长依赖
缺点:计算复杂度高,运行时间长
(3)LSTM中参数的计算

- 首先参数的个数和 时间steps 无关
- $h_t$ 和 $c_t$ 的维度是相同的
- 总共四组 [w, b] 参数
直接给出公式 $$ 4(n(m +n) +n)$$ 其中 $m$ 表示输入 $x$ 的维度, $n$ 表示 hidden 或者说 context 的维度。 $(m+n)$ 表示在处理下一层的 输入时候,把当前层数据 $x$ 的维度 $m$ 和 hidden 中维度 $n$ 给链接起来,具体可以看一下 lstm 中的示意图。
根据代码可以加深一下理解
|
|
这个对于 pytorch 中 lstm 的实现讲解的比较好:LSTM:Pytorch实现, 可以作为参考。
GRU
GRU (gated recurrent unit) 是对于 LSTM 速度上的提升,但是相应的表达能力也受到了限制

GRU 中一共有两个门。GRU 把LSTM 中遗忘门(forget gate) 和输入门(input gate) 使用 更新门(update gate) 进行代替。还有一个重置门(reset gate), 重置门主要决定了多少过去的信息需要遗忘。GRU 不会保存内部记忆 context,而且没有输出门。
文章作者 jijeng
上次更新 2019-11-28